
Offline-Roboterprogrammierung
Industrieroboter sicher und effizient programmieren – ohne Produktionsunterbrechung.


Das direkte Programmieren von Industrierobotern an der Maschine ist oft langsam und ineffizient. Während des Einlernvorgangs muss der Roboter außer Betrieb genommen werden, wodurch die Produktion vollständig zum Erliegen kommt. Jede Minute, die für die manuelle Positionierung eines Roboters aufgewendet wird, ist eine Minute, in der das System nicht produziert.
Die SoftART AG entwickelt Software zur Offline-Roboterprogrammierung, die diese Engpässe beseitigt, indem sie die Programmierung und Validierung in eine virtuelle 3D-Umgebung verlagert.
Bevor ein Programm auf den eigentlichen Roboter übertragen wird, wird es offline umfassend validiert:
Präzise kinematische Simulation des Robotersystems
Automatische Kollisionserkennung mit Werkzeugen, Werkstücken und Vorrichtungen
Optimierte Roboterbahnen für flüssige und zuverlässige Bewegungen
Dieser Ansatz ermöglicht es selbst Nicht-Experten, hochwertige Roboterprogramme sicher und effizient zu erstellen. Sobald das Programm offline getestet und finalisiert wurde, kann es mit minimalen Stillstandszeiten auf den Roboter übertragen werden – sodass die Maschine fast augenblicklich wieder produktiv arbeiten kann.
SoftART unterstützt eine Vielzahl von Roboterherstellern und passt jede Lösung exakt an die Workflows des Kunden an. Das garantiert eine intuitive Bedienung, zuverlässige Performance und spürbare Produktivitätsgewinne.

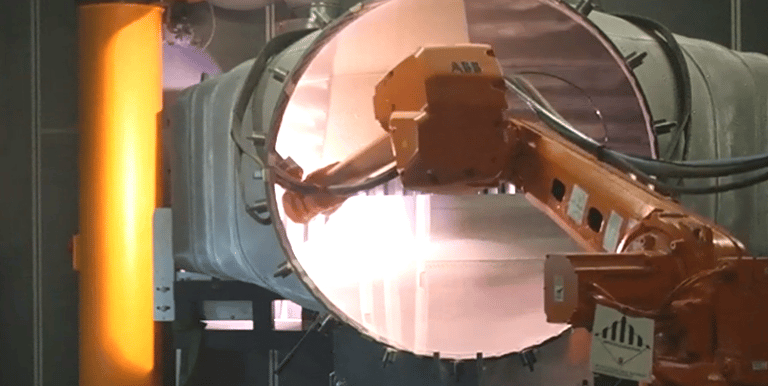
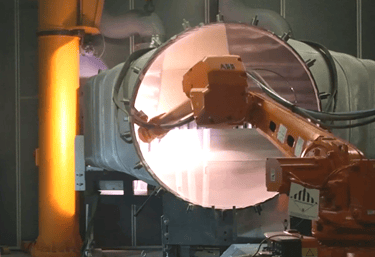


Heissgasgehäuse-Beschichtung
Heissgasgehäuse sind kritische Komponenten von Gasturbinen, die auf allen Innenflächen eine spezielle Hitzeschutzbeschichtung erfordern. Aufgrund der Grösse des Gehäuses, der engen Durchgänge und der komplexen inneren Geometrie ist eine gleichmäßige Beschichtung nur mit einem hochpräzisen Roboterverfahren möglich. Die SoftART AG lieferte ein vollständig offline generiertes Roboterprogramm, um diese anspruchsvolle Beschichtungsaufgabe sicher und präzise auszuführen.
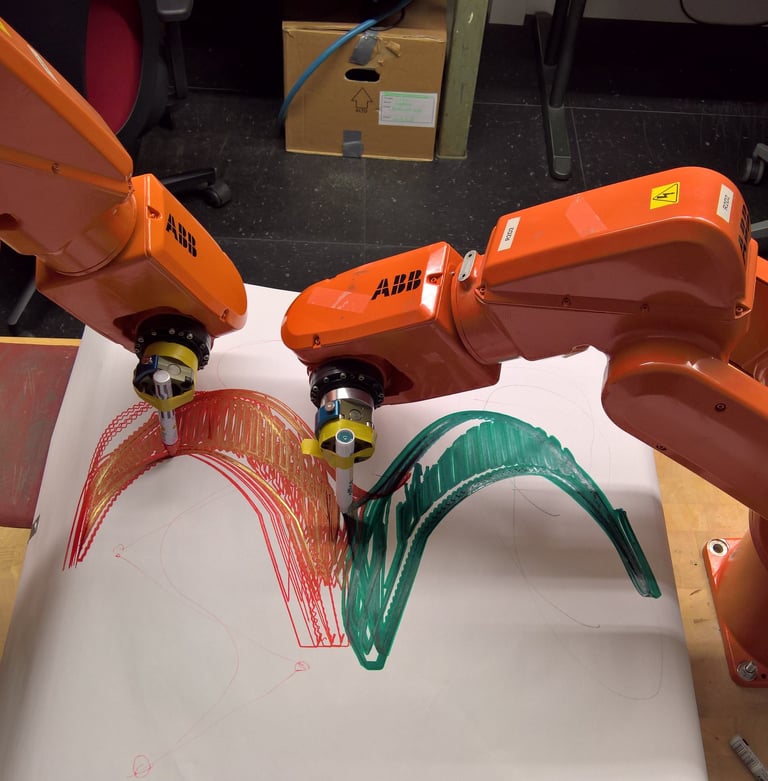
Beschichtung der Kaplan-Schaufel
Für das Grosswasserkraftwerk Santo Antonio in Brasilien benötigen die Schaufeln der Kaplan-Turbinen eine äusserst langlebige, abriebfeste Beschichtung, um den extremen Strömungsbedingungen standzuhalten. Die SoftART AG lieferte ein vollständig offline erstelltes Roboterprogramm, um sicherzustellen, dass die Beschichtung präzise und gleichmässig auf diese grossen, komplexen Bauteile aufgebracht wird.
Erfolgreiche Offline-Roboterprogrammierung in der Praxis
Die SoftART AG hat ihren Kunden dabei geholfen, die Inbetriebnahmezeit erheblich zu verkürzen, indem sie Roboterprogramme vollständig in einer virtuellen Umgebung erstellt hat. Anstelle langwieriger Anpassungen an der Maschine erhalten unsere Kunden getestete, optimierte und einsatzbereite Programme, die genau auf ihren Arbeitsablauf, ihre Ausrüstung und ihre Roboter-Marke zugeschnitten sind.
Robotertyp: 6-Achs-Industrieroboter Motoman (Yaskawa)
Wichtigste Ergebnisse:
Kein manuelles Einlernen erforderlich – das Roboterprogramm wurde vollständig offline generiert
Konstante und gleichmäßige Beschichtungsqualität über die gesamte gekrümmte Oberfläche der Kaplan-Laufschaufel hinweg
Kollisionsfreie, validierte Bewegungsbahnen dank vollständiger digitaler Simulation
Kürzere Rüstzeiten an der Roboterzelle, da alle Bewegungen vorab validiert wurden
Wiederholbarer Prozess, der für mehrere Schaufeln der Turbinenbaureihe wiederverwendet werden kann
Robotertyp: 6-Achsen-Roboter auf einer Linearführung (ABB)
Wichtigste Ergebnisse:
Sicheres Einfahren des Roboters in enge Innenräume dank kollisionsgeprüfter Simulationen
Vollständige und gleichmässige Beschichtung aller Innenflächen des Heissgasgehäuses
Kein manuelles Teachen im Bauteil – ermöglicht einen Prozess, der von Hand unmöglich durchzuführen wäre
Optimierte Bahnen für ein System aus Roboter und Linearachse, vor dem Einsatz vollständig simuliert
Zuverlässiges und reproduzierbares Beschichtungsverfahren für große Turbinenkomponenten
Prozess: Die SoftART AG simulierte den Roboter und die Linearachsen in einem detaillierten Modell des Heißgasgehäuses. Alle Beschichtungsbahnen wurden offline mit validierten, kollisionsfreien Bewegungsabläufen generiert, was eine präzise Innenbeschichtung ohne manuelles Einlernen ermöglichte.
Prozess: Der komplette Beschichtungsprozess wurde digital simuliert: Schaufelgeometrie, Roboterkinematik, Sprühbilder und Bewegungsbahnen wurden in der Offline-Programmierumgebung von SoftART modelliert und validiert.
© 2026 - SoftART AG | Hardturmstrasse 18 | 8005 Zurich | Telefon: +41 44 552 17 40 | E-Mail: mail@softart.ch
Unternehmen
Dienstleistungen
Rechtliches