
Offline Robot Programming
Program industrial robots safely and efficiently — without interrupting production.


Programming industrial robots directly on the machine is often slow and inefficient. During the teaching process, the robot must be taken out of operation, stopping production entirely. Every minute spent manually positioning a robot is a minute the system is not producing.
SoftART AG develops offline robot programming software that removes these bottlenecks by shifting programming and validation into a virtual 3D environment.
Before a program is deployed to the real robot, it is fully validated offline:
Accurate kinematic simulation of the robot system
Automatic collision detection with tools, workpieces, and fixtures
Optimized robot paths for smooth, reliable motion
This approach allows even non‑experts to generate high‑quality robot programs safely and efficiently. Once the program has been tested and finalized offline, it can be uploaded to the robot with minimal downtime—allowing the machine to return to productive work almost immediately.
SoftART supports multiple robot manufacturers and adapts each solution to the customer’s workflows, ensuring intuitive operation, reliable performance, and notable productivity gains.

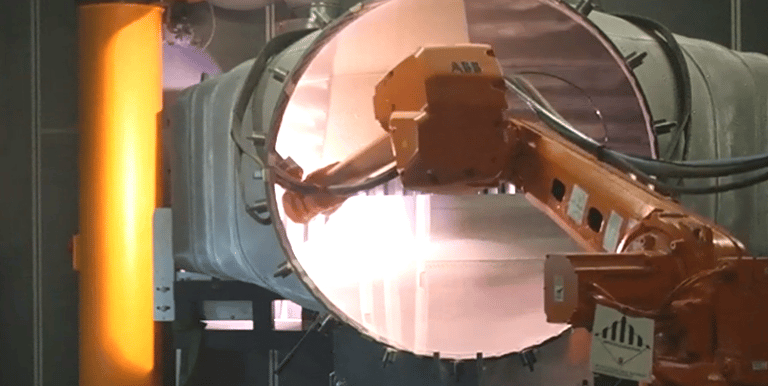
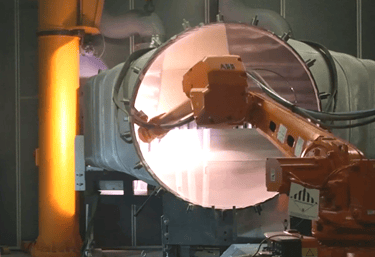


Coating of Hot Gas Casing
Hot Gas Casings are critical components of gas turbines, requiring a specialized heat‑protective coating on all internal surfaces. Due to the casing’s size, narrow passages, and complex internal geometry, achieving uniform coating coverage is only possible with a high‑precision robotic process. SoftART AG delivered a fully offline‑generated robot program to execute this demanding coating task safely and accurately.
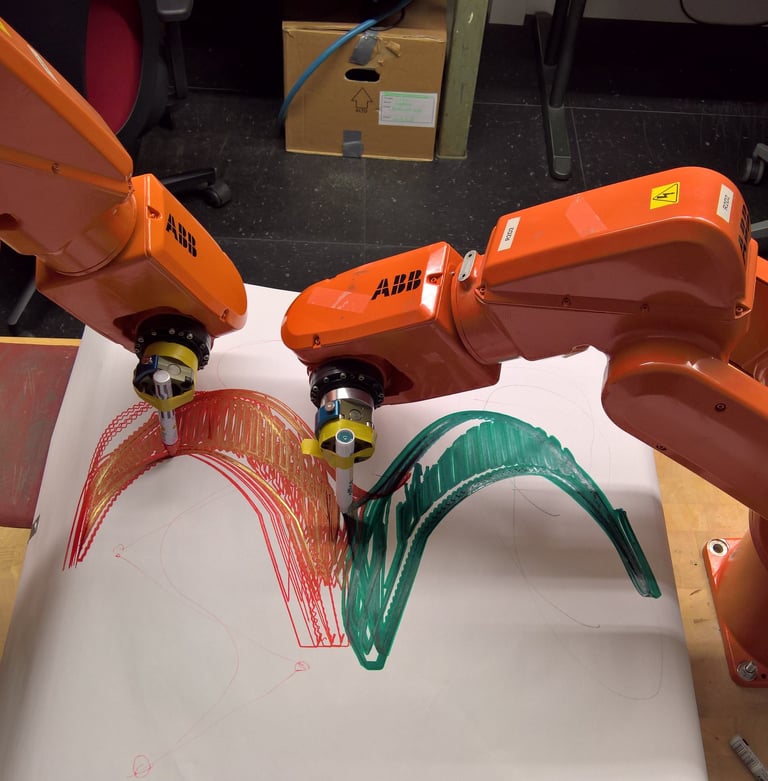
Coating of Kaplan Blade
For the large‑scale Santo Antonio hydroelectric power plant in Brazil, Kaplan turbine blades require a highly durable abrasion‑resistant coating to withstand extreme water flow conditions. SoftART AG delivered a fully offline‑generated robot program to ensure the coating is applied with precise and consistent coating of these large, complex components.
Real‑World Offline Robot Programming Successes
SoftART AG has helped customers significantly reduce commissioning time by preparing robot programs entirely in a virtual environment. Instead of long on‑machine adjustments, our customers receive tested, optimized, and ready‑to‑run programs tailored to their workflow, equipment, and robot brand.
Robot Type: 6‑axis Motoman industrial robot (Yaskawa)
Key Result:
No manual teaching required — robot program fully generated offline
Consistent and uniform coating quality across the entire curved Kaplan blade surface
Collision‑free, validated motion paths thanks to full digital simulation
Shorter setup time on the robotic cell since all motions were pre‑validated
Repeatable process that can be reused for multiple blades of the turbine series
Robot Type: 6‑axis robot mounted on a linear track (ABB)
Key Result:
Safe robot entry into confined internal spaces thanks to collision‑validated simulations
Complete and uniform coating coverage on all interior surfaces of the Hot Gas Casing
No manual teaching inside the part, enabling a task impossible to perform by hand
Optimized paths for a robot + linear axis system, fully simulated before deployment
Reliable and repeatable coating process for large turbine components
Process: SoftART AG simulated the robot and linear axis inside a detailed model of the Hot Gas Casing. All coating paths were generated offline with validated collision‑free motion, enabling precise internal coating without manual teaching.
Process: The complete coating operation was simulated digitally: blade geometry, robot kinematics, spray patterns, and motion paths were modeled and validated in SoftART’s offline programming environment
© 2026 - SoftART AG. · Hardturmstrasse 18 · 8005 Zurich · Phone: +41 44 552 17 40 · E-mail: mail@softart.ch
Company
Services
Legal