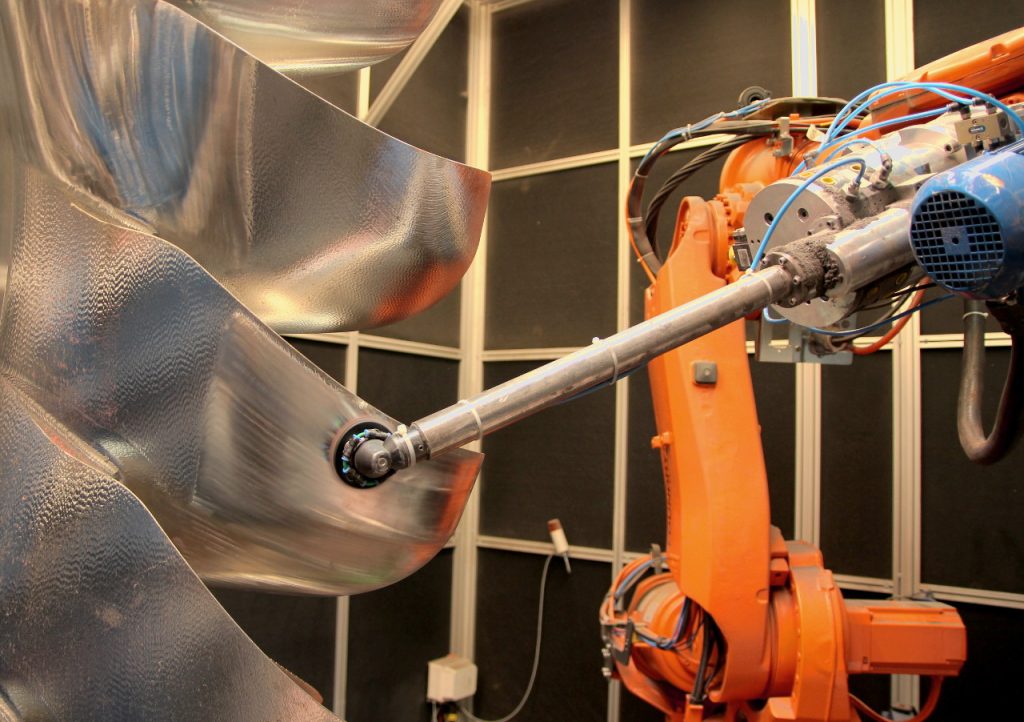

Fabrication Process Automation
Robot-controlled production processes are becoming more and more important in industry. The high efficiency, accuracy and reproducibility are decisive factors that drive this development.
SoftART has specialized in programming industrial robots for very complex processing steps. In particular, the processing of components with irregular shapes can be implemented particularly efficiently with our processes and libraries.
SoftART has specialized in programming industrial robots for very complex processing steps. In particular, the processing of components with irregular shapes can be implemented particularly efficiently with our processes and libraries.
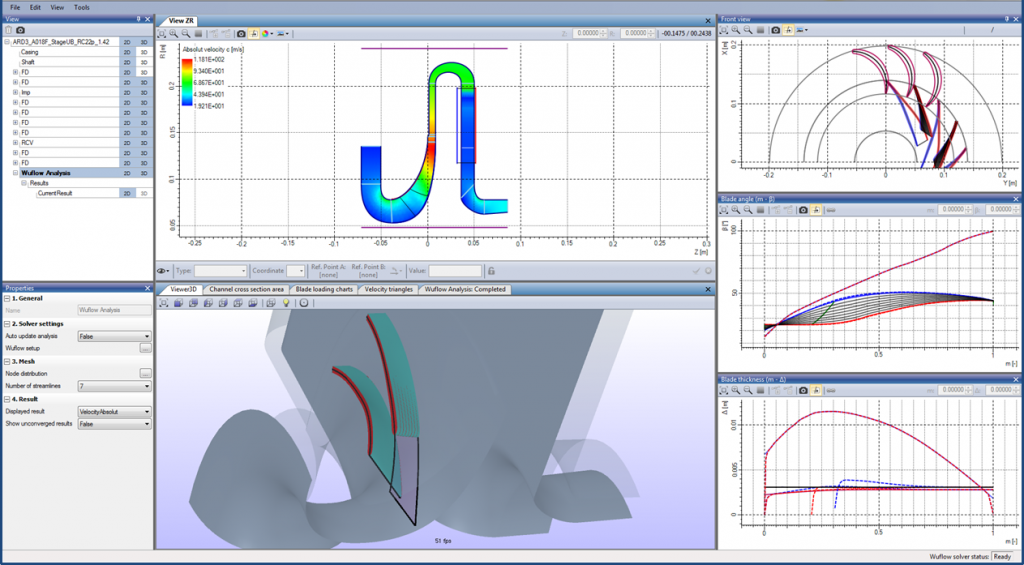
Design software
Hydraulic and thermodynamic machines are designed and optimized in a design process. This requires precise knowledge of the physical processes that run in these machines. SoftART has developed software for various customers to support the engineers in this work.

Offline robot programming
Various options are available for programming robots. The machines are often programmed using the teaching method. The robots are brought into different positions, which can then be saved.
This is extremely time-consuming and unproductive since the robots are not available during this time.
This is extremely time-consuming and unproductive since the robots are not available during this time.
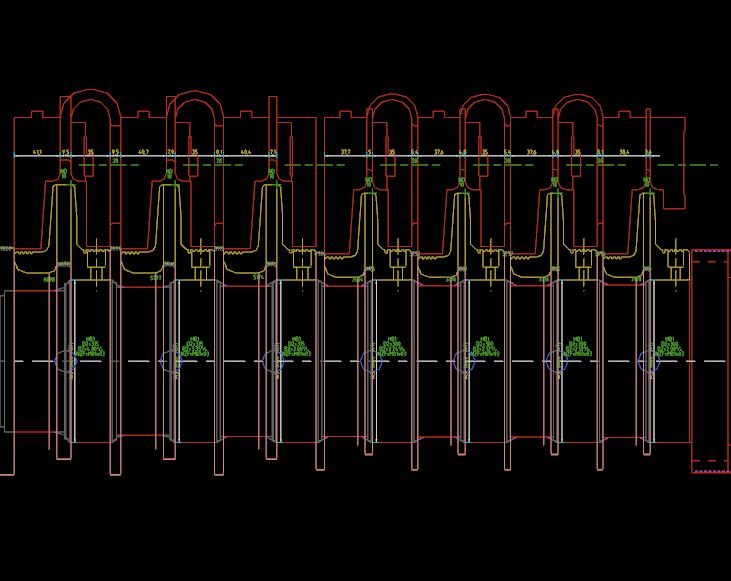
CAD automation
Siemens NX is a highly developed CAD program that is used in many industries. The master model concept is a central element in NX for parameterizing components. In this way, similar components (e.g. screws) in different sizes and designs can be designed very quickly.
In the case of more complex components (eg turbine wheels), this parameterization becomes so complicated and time-consuming that it is no longer practicable.
In the case of more complex components (eg turbine wheels), this parameterization becomes so complicated and time-consuming that it is no longer practicable.