
Problemstellung
Für optimale Wirkungsgrade bei der Energieerzeugung aus Wasserkraft werden bei Peltonturbinen möglichst glatte Oberflächen benötigt. Da die Fräsbearbeitung für gekrümmte, glatte Oberflächen finanziell und zeitlich sehr aufwändig ist, wird die Oberfläche heute noch manuell geschliffen.
Lösung
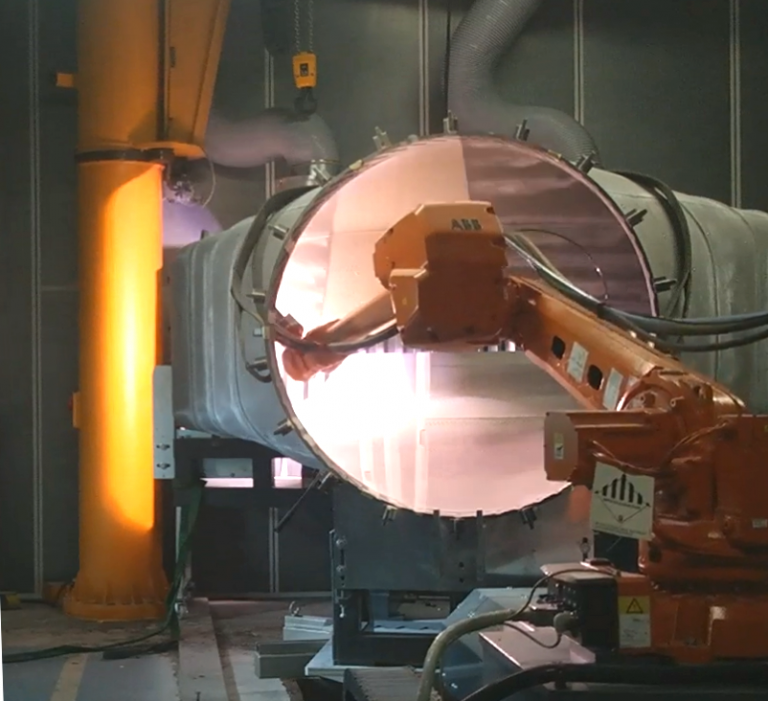
In Zukunft soll ein Roboter einen grossen Teil der Schleifarbeiten übernehmen. Der Roboter arbeitet mit einer an einer Verlängerung angebrachten Schleifscheibe. Die kompakte Bauweise erlaubt es dem Roboter, auch schlecht zugängliche Bereiche zu erreichen. Das Schleifpapier ist mittels Klettverbindung an der Scheibe befestigt, was ein automatisches Austauschen der Scheibe durch den Roboter erlaubt. Ein integrierter Kraftsensor ermöglicht Rückschlüsse darüber, ob die Scheibe abgenutzt ist, oder ob sie noch weiter verwendet werden kann.
Besonderes
Nebst Zeit- und Kostenersparnis kann mit dem Roboter auch eine erhöhte Masshaltigkeit erreicht werden. Der am Roboter angebrachte Kraftsensor erlaubt nebst konstantem Anpressdruck auch eine recht präzise Vermessung des Peltonbechers. Allfällige Abweichungen zur Sollgeometrie können durch anpassen der Schleifgeschwindigkeit korrigiert werden.

Robotic arm with extension

Grinding wheel in action